
29 ago Escaneado 3D nociones básicas
En la mayoría de los casos, la opinión general sobre el escaneado 3D de objetos es bastante alejada de la realidad.
Existen una gran variedad de aparatos de escaneado 3D. El funcionamiento básico de uno de estos aparatos es el siguiente:
1. Disponen de un emisor de haz laser y una cámara digital.
2. El emisor lanza el haz hacia el objeto.
3. La óptica de la cámara captura el rebote, permitiendo calcular la distancia de cada punto del objeto a la cámara.
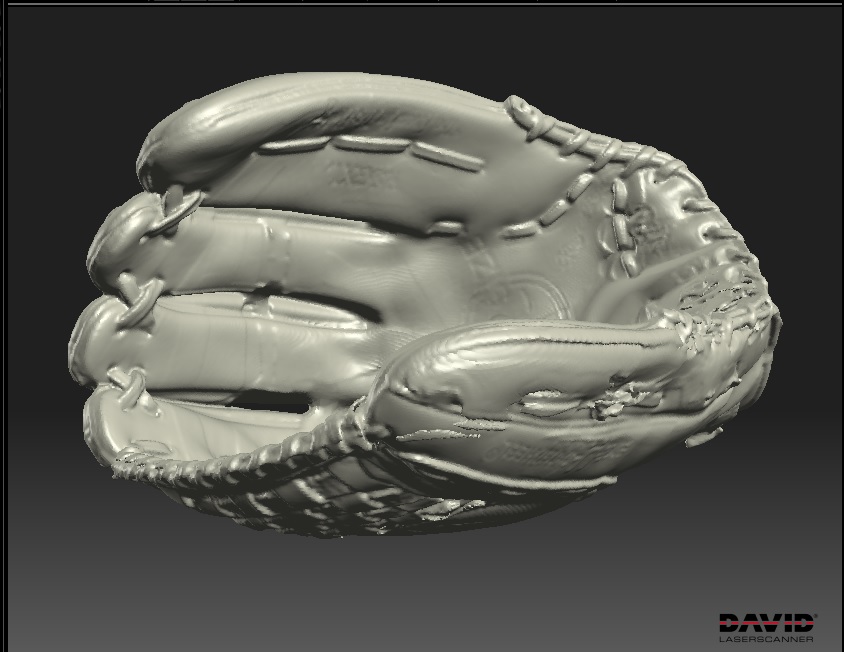
4. Los datos de las distancias se transmiten a un programa que convierte la nube de puntos en un objeto en formato OBJ visible desde la mayoría de los ordenadores en la actualidad.
Algunos escaneres 3D permiten una toma continua girando sobre el objeto hasta obtener una malla completa del mismo, pero en la mayoría de los casos se deben de realizar varias tomas para obtener una imagen total del objeto.
Una vez obtenido el fichero OBJ se debe de trabajar sobre el mismo para regularizar la malla definitiva sin que se pierda ningún detalle. Existen distintos tipos de procesos para convertir la nube de puntos del escaner en una malla poligonal utilizable y con un peso en Mb aceptable, pero eso será objeto de otro artículo.
En general el trabajo para obtener una malla regular supone una inversión en horas superior al propio escaneado. Basicamente se trata de hacer una retopología sobre el OBJ obtenido a partir del escaner 3D. La retopología es el modelado de polígonos sobre el OBJ. Este es un proceso laborioso. Algunos programas permiten rehacer la malla de manera automática pero en algunos casos no resulta una malla definitiva.
Sorry, the comment form is closed at this time.